





Bürstenlose Gleichstrommotoren werden verwendet, weil sie effizient, zuverlässig sind und weniger Wartung benötigen als gebürstete Motoren. Sie verwenden elektronische Kommutierung anstelle von Bürsten, was die Kontrolle verbessert und den Verschleiß reduziert. Ihre Leistung hängt vom Motordesign, dem Timing, der Rückkopplung, der Steuerungsmethode, der Antriebselektronik, dem Drehmomentverhalten und den Wärmegrenzen ab. Dieser Artikel gibt Informationen zu all diesen Punkten.

Grundlagen bürstenloser Gleichstrommotor
Was ist ein bürstenloser Gleichstrommotor (BLDC)?
Ein bürstenloser Gleichstrommotor (BLDC) ist ein Permanentmagnetmotor, der von einer Gleichstromquelle betrieben wird und mit elektronischer Kommutation statt mit Bürsten und einem mechanischen Kommutator betrieben wird. Ein Regler leitet Strom durch die Statorwicklungen in einer geplanten Reihenfolge, um ein rotierendes Magnetfeld zu erzeugen. Der Rotor enthält Permanentmagnete, die diesem rotierenden Feld folgen und eine Rotation erzeugen. Da keine Bürsten an einem Kommutator reiben, wird der mechanische Verschleiß reduziert, der Wartungsaufwand geringer und die Effizienz oft höher. Drehzahl und Drehmoment werden dadurch gesteuert, wie der Regler das Schalten timet und Spannung und Strom anpasst.
BLDC vs. gebürstetes DC vs. PMSM
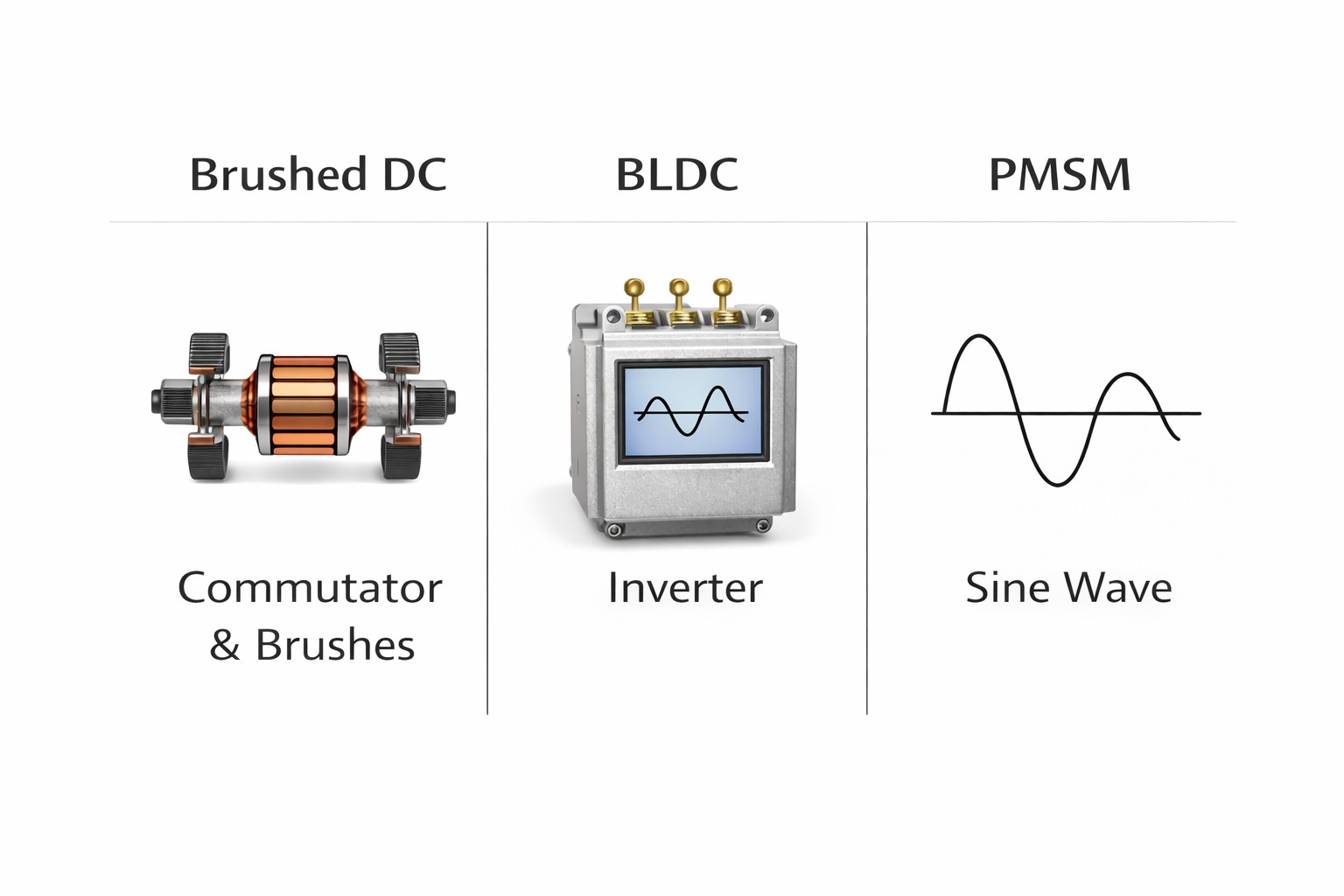
Gebürstete Gleichstrommotoren verwenden Bürsten und einen Kommutator, um den Strom im Motor zu schalten, was die Steuerung vereinfacht, aber zu Verschleißteilen führt. BLDC-Motoren entfernen die Bürsten und verwenden einen elektronischen Regler, um die Statorphasen zu wechseln, sodass die Kommutation elektronisch durchgeführt wird. PMSM-Motoren verwenden außerdem Permanentmagnete und elektronische Steuerung, sodass ihre Hardware wie die eines BLDC-Motors aussehen kann. Der gemeinsame Unterschied besteht darin, wie die Spannungswellenform des Motors geformt ist und wie der Regler die Phasen antreibt. BLDC-Systeme werden oft mit trapezförmigen Wellenformen und schrittbasierter Kommutation assoziiert, während PMSM-Systeme häufig mit sinusförmigen Wellenformen und glatteren Steuerungsmethoden verbunden sind.
Elektronische Umschaltung und Umschaltzeit
Bürstenloser Gleichstrommotor Basisprinzipien
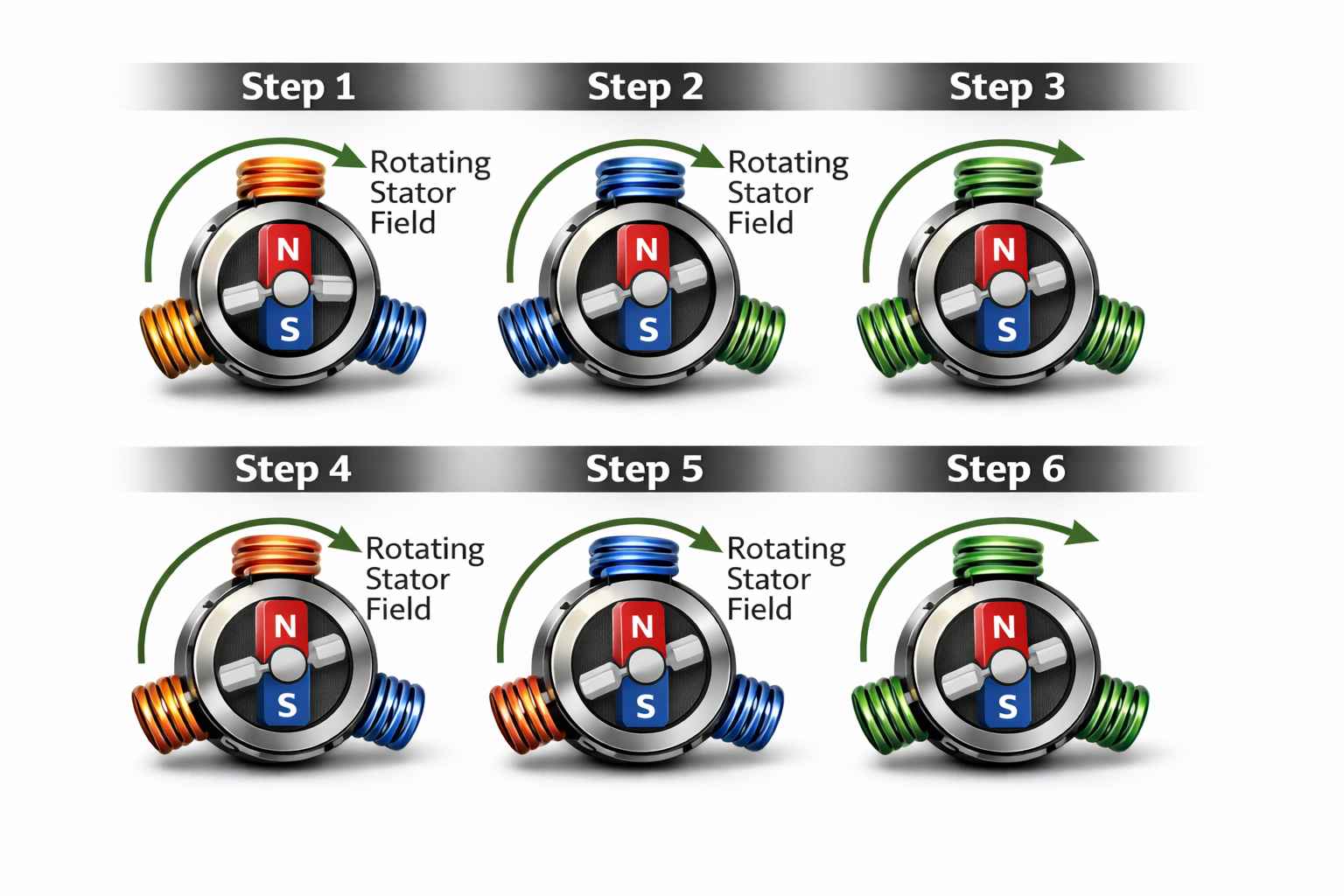
Ein BLDC-Motor erzeugt Bewegung, wenn Strom in den Statorwicklungen ein Magnetfeld erzeugt, das mit den Permanentmagneten des Rotors interagiert. Der Regler sendet Strom in wiederholender Reihenfolge zu den Wicklungen, sodass sich der stärkste Teil des Magnetfeldes des Stators weiter um den Motor verschiebt. Dieses Verschiebungsmuster wirkt wie ein rotierendes Magnetfeld. Während sich das Statorfeld bewegt, drehen sich die Rotormagnete weiter, um mit ihm ausgerichtet zu bleiben. Diese gleichmäßige Nachwirkung sorgt für kontinuierliche Drehung und Drehmoment.
Schalttiming und seine Auswirkungen
• Wenn der Wechsel zu früh erfolgt, führt das Statorfeld die Position des Rotors an und das Drehmoment wird schwächer.
• Wenn das Schalten zu spät erfolgt, hinkt das Statorfeld hinter dem Rotor zurück und die Drehmomentwelle nimmt zu.
• Ein richtiges Schalttiming verbessert die Drehmomenteffizienz und reduziert Lärm und Vibrationen.
BLDC-Motorkonstruktion und Kernkomponenten
Kernmotorteile
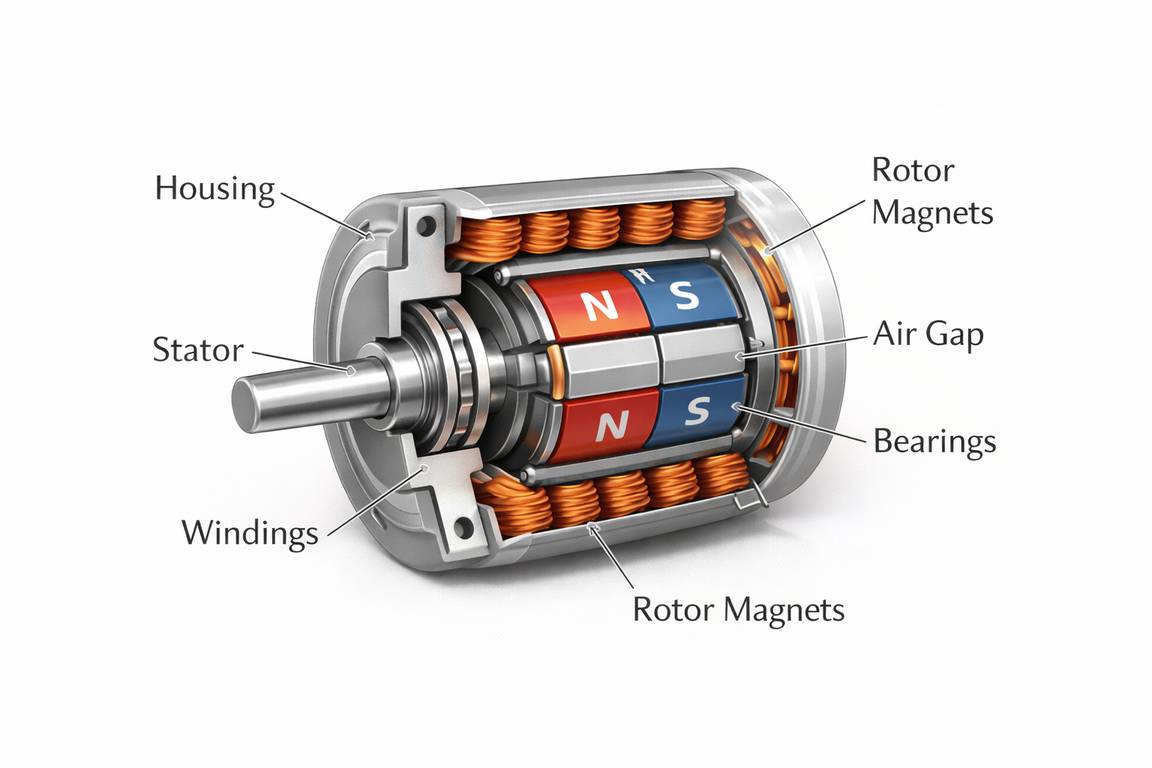
Ein BLDC-Motor besteht aus einem Stator, einem Rotor mit Permanentmagneten, einem Luftspalt, Lagern und einem Gehäuse. Der Stator besteht aus laminiertem Stahl und trägt Mehrphasenwicklungen, die das rotierende Magnetfeld erzeugen. Der Rotor enthält Permanentmagnete, die diesem rotierenden Feld folgen, um Bewegung zu erzeugen. Der Luftspalt zwischen Stator und Rotor beeinflusst die magnetische Kopplung, die Drehmomentdichte und den reibungslosen Betrieb. Lager unterstützen die Welle und beeinflussen Reibung, Vibration und Lebensdauer der Wirkung. Das Gehäuse hält die Baugruppe ausgerichtet und hilft, die Wärme vom Motor abzuleiten.
Rotor-Designfaktoren
Das Rotordesign beeinflusst Drehmoment, Geschwindigkeitsverhalten und mechanische Festigkeit. Die Polanzahl bestimmt die Beziehung zwischen elektrischer Kommutation und mechanischer Rotation; Mehr Pole verbessern das Drehmoment bei niedrigen Drehzahlen, erfordern aber schnelleres elektrisches Schalten. Auch die Magnetplatzierung beeinflusst die Leistung. Oberflächenmontierte Magnete sind häufig und einfach, während Innenmagnete bei höheren Geschwindigkeiten eine bessere mechanische Bindung bieten. Das Magnetmaterial bestimmt die magnetische Festigkeit und Temperaturstabilität und beeinflusst die Drehmomentfähigkeit und Zuverlässigkeit.
Winding-Verbindungen: Star (Wye) vs Delta
Die Statorwicklungen in einem BLDC-Motor sind üblicherweise in Stern- (Wye-) oder Delta-Form verbunden.
| Verbindung | Praktische Wirkung (typisch) | Was es unterstützt |
|---|---|---|
| Star (Wye) | Höheres Drehmoment pro Volt bei niedrigerer Drehzahl | Stärkerer Betrieb mit niedriger Geschwindigkeit bei begrenzter Spannung |
| Delta | Höheres Drehzahlpotential bei derselben Spannung | Höhere Drehzahl bei geringerem Drehmomentbedarf |
Rotorpositionserkennung und Rückkopplungsoptionen
Warum benötigt der Antrieb eine Rotorposition?
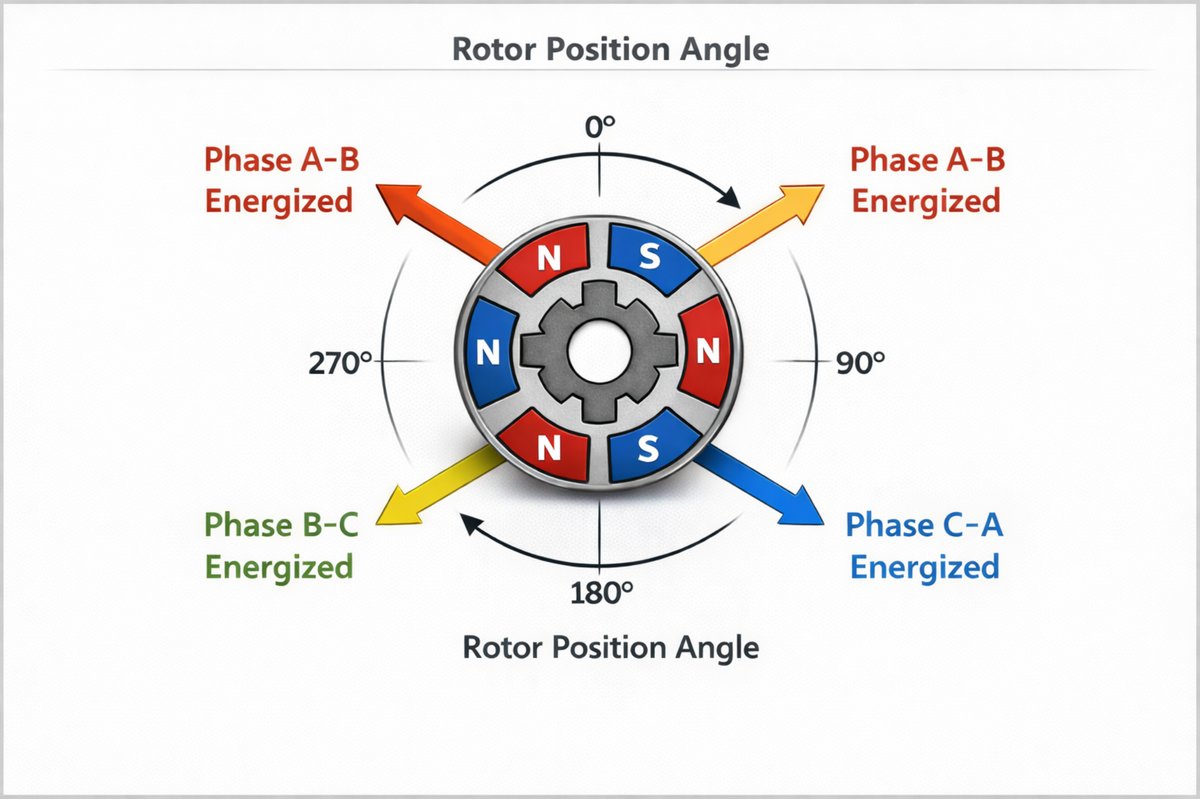
Der Steuerregler muss die Position des Rotors kennen (oder schätzen), um die richtigen Phasen zur richtigen Zeit zu aktivieren. Ohne Rotorpositionsinformationen driftet die Kommutationszeit, das Drehmoment sinkt und die Erwärmung steigt beim Start und bei niedriger Geschwindigkeit an.
Hall-Sensoren vs. Encoder vs. sensorloser BLDC
• Hallensensoren: erschwinglich und zuverlässig für einfache Umstellung und starkes Startmoment.
• Encoder/Resolver: werden verwendet, wenn eine genaue Geschwindigkeits-/Positionssteuerung erforderlich ist.
• Sensorlos (rückwärts EMF-basiert): weniger Drähte/Teile, aber bei sehr niedriger Geschwindigkeit und beim Start aufgrund schwacher Rückelektromagnetik.
BLDC-Kommutations- und Kontrollmethoden
Wechselstile: 6-Stufe vs. sinusförmig / FOC
| Methode | Was der Controller macht | Ergebnis |
|---|---|---|
| 6-Stufe (trapezförmig) | Schalter gehen in diskreten Schritten ab | Einfach und robust; Mehr Welle/Rauschen möglich |
| Sinusförmig / FOC | Treibt glatte Phasenströme mittels Vektorsteuerung an | Sanfteres Drehmoment; oft leiser und effizienter über einen großen Bereich |
Wann 6-Step Sinn macht vs. wann FOC besser ist
Beide Methoden funktionieren gut, werden aber für unterschiedliche Ziele gewählt.
• Die 6-Stufe wird oft gewählt, wenn Einfachheit, Kosten und Robustheit wichtig sind.
• FOC wird gewählt, wenn gleichmäßiges Drehmoment, geringe Geräusche und präzise Steuerung über einen weiten Geschwindigkeitsbereich hinweg relevant sind.
Elektronik des BLDC-Antriebssystems
Dreiphasen-Wechselstrombrücke
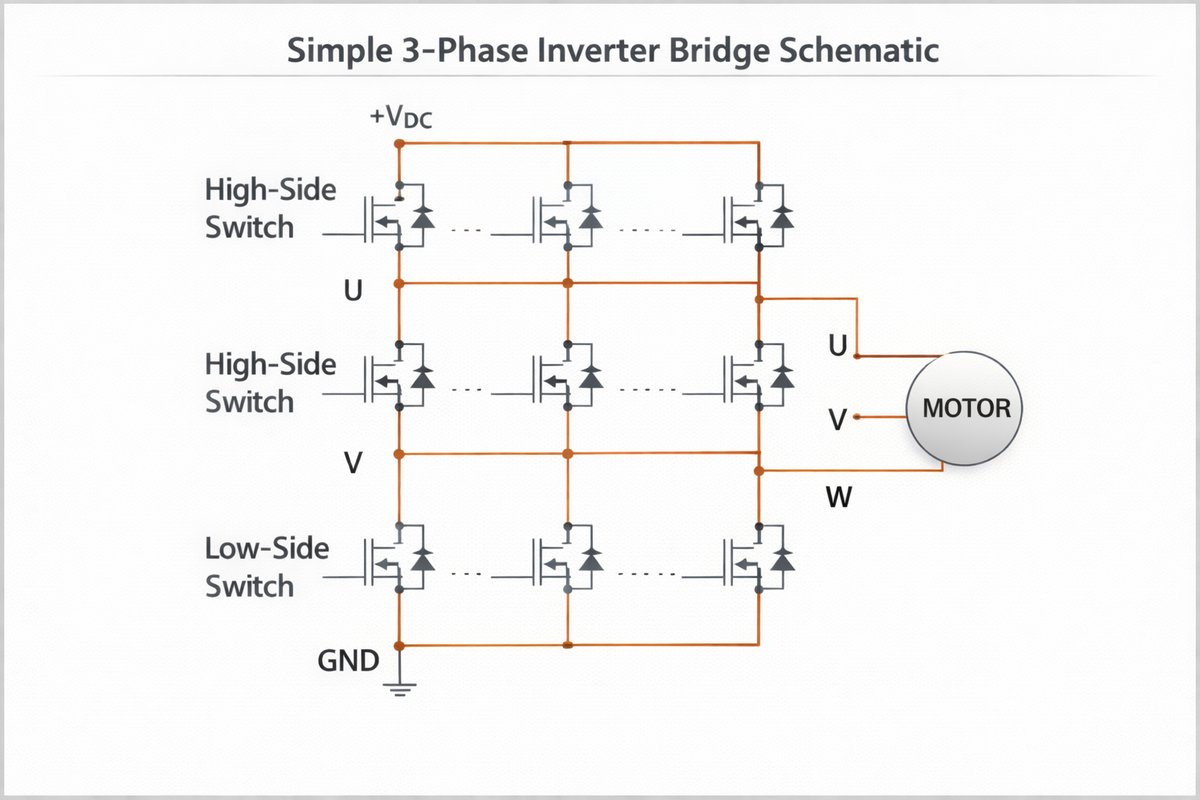
Ein BLDC-Motor benötigt einen elektronischen Antrieb, um die Kommutation durchzuführen. Die Leistungsstufe ist ein Dreiphasenwechselrichter, der aus sechs Schaltern besteht. Indem diese Geräte in der richtigen Reihenfolge geschaltet werden, leitet der Antrieb Gleichstrom in die Motorphasen und erzeugt ein rotierendes Statorfeld.
Controller-Rollen
• Leistungsschalter: MOSFETs in vielen BLDC-Spannungsbereichen.
• Gate-Treiber + Schutzmaßnahmen: sicheres Schalten, Totzeitregelung und Fehlerbehandlung.
• Steuerlogik (MCU/DSP): Kommutationszeit, PWM-Steuerung, Sensormessung und Grenzwertmanagement.
Geschwindigkeit, Drehmoment und Bremsen bei bürstenlosen Gleichstrommotoren
7,1 Drehzahl- und Drehmomentkontrolle: PWM und Stromgrenzen
Drehzahlregelung: PWM-Achszyklus ändert die effektive Gleichspannung des Motors, was wiederum seine Drehzahl verändert.
Geschwindigkeitsschleife: Der Controller vergleicht die Zielgeschwindigkeit mit der gemessenen oder geschätzten Geschwindigkeit und korrigiert die Ausgabe, falls ein Fehler auftritt.
Drehmoment und Strom: Das Motordrehmoment steht in engem Zusammenhang mit dem Phasenstrom, daher begrenzt auch die Strombegrenzung das Drehmoment.
Strombegrenzung: Das Laufwerk überwacht den Strom und reduziert bei Bedarf PWM, um Schäden bei Starts, Stopps und plötzlichen Laständerungen zu vermeiden.
Richtungsumschwung und Brems-/Regenerationsgrundlagen
• Richtungsumkehr: Der Motor kann in die entgegengesetzte Richtung laufen, indem er die Kommutationsreihenfolge umkehrt, was die Phasenfolge verändert.
• Bremsen: Der Antrieb kann ein Drehmoment entgegengesetzt zur Bewegungsrichtung anwenden, um den Rotor kontrolliert abzubremsen.
• Regeneration: Beim Bremsen unter den richtigen Bedingungen kann der Motor als Generator fungieren und Energie zurück an den Gleichstrombus senden.
Richtungssteuerung, Bremsen und Regeneration ergeben sich alle davon, wie der Antrieb die Motorphasen wechselt und den Strom steuert. Durch Änderung der Kommutationsreihenfolge und Drehmomentsteuerung kann derselbe BLDC-Motor vorwärts oder rückwärts laufen, gleichmäßig abbremsen und in einigen Systemen einen Teil seiner Energie an die Versorgung zurückgeben.
Leistung und Grenzen bürstenloser Gleichstrommotoren
Wie verhalten sich Drehzahl und Drehmoment in einem BLDC-Motor?
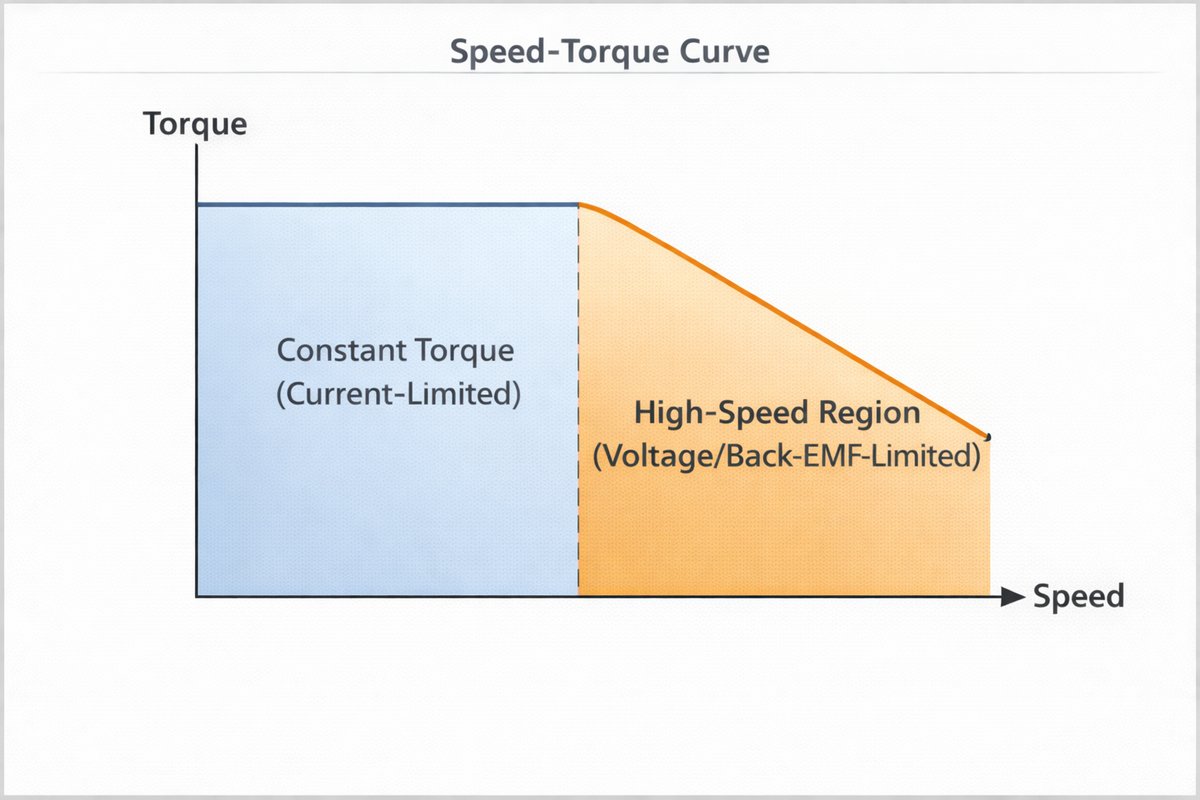
Ein bürstenloser Gleichstrommotor liefert nicht bei jeder Drehzahl das gleiche Drehmoment. Bei niedriger Drehzahl ist das Drehmoment durch die Stromkapazität des Antriebs begrenzt. Bei höheren Drehzahlen erreicht der Motor einen Punkt, an dem die Gleichstromspannung und die Gegen-EMF das Drehmoment des Antriebs begrenzen. Auf einer Drehzahl-Drehmoment-Kurve zeigt sich dies als flacher Bereich mit fast konstantem Drehmoment bei niedrigeren Drehzahlen und einem abfallenden Drehmomentbereich bei höheren Geschwindigkeiten.
Welche Faktoren bestimmen die Höchstgeschwindigkeit eines BLDC-Motors?
• DC-Busspannung: Eine höhere DC-Busspannung bietet mehr Spannungsfreiraum, um die Gegen-EMK bei hohen Geschwindigkeiten zu überwinden.
• Gegen-EMK (Ke/KV): Die Gegen-EMK nimmt mit der Geschwindigkeit zu und reduziert die Spannung, die der Antrieb nutzen kann, um Strom in die Wicklungen zu leiten.
• Regelungsmethode: Verschiedene Steuerungsmethoden beeinflussen, wie gut der Antrieb das Drehmoment bei steigender Geschwindigkeit hält.
• Thermik: Verluste in den Wicklungen und der Elektronik nehmen mit Geschwindigkeit und Last zu, was die Länge des Motors bei hoher Geschwindigkeit begrenzt.
Die wichtigsten Spezifikationen für bürstenlose Gleichstrommotoren
| Spec-Begriff (Katalog) | Was sagt es dir | Warum es wichtig ist |
|---|---|---|
| Nennspannung / DC-Busbereich | Normaler Versorgungsspannungsbereich | Legt den möglichen Geschwindigkeitsbereich ein und hilft dabei, den richtigen Antrieb auszuwählen |
| Nennstrom/Dauerstrom | Strom, der für den längeren Gebrauch sicher ist | Zeigt, wie viel Erwärmung bei einer gegebenen Last stattfindet |
| Nennleistung (W) | Ausgangsleistung an einem bestimmten Punkt | Hilft beim Vergleich der Stärke verschiedener Motoren |
| Nenndrehmoment/Spitzendrehmoment | Wie viel Drehkraft der Motor ausüben kann | Zeigt, wie er mit Start- und kurzen Überlastungen umgehen wird |
| Geschwindigkeit (RPM) | Normaler Betriebsdrehzahlbereich | Hilft, den Motor an die Zahnräder und die Last anzupassen |
| Kv / Ke und Kt Konstanten | Linkgeschwindigkeit, Spannung und Drehmoment | Verbindet Spannung und Strom mit der realen Motorleistung |
| Effizienz | Wie viel Eingangsleistung wird zu mechanischer Leistung | Beeinflusst Heizung, Akkulaufzeit und Betriebskosten |
Effizienz, Verluste und Wärme in bürstenlosen Gleichstrommotoren
Verlustquellen in einem bürstenlosen Gleichstrommotor
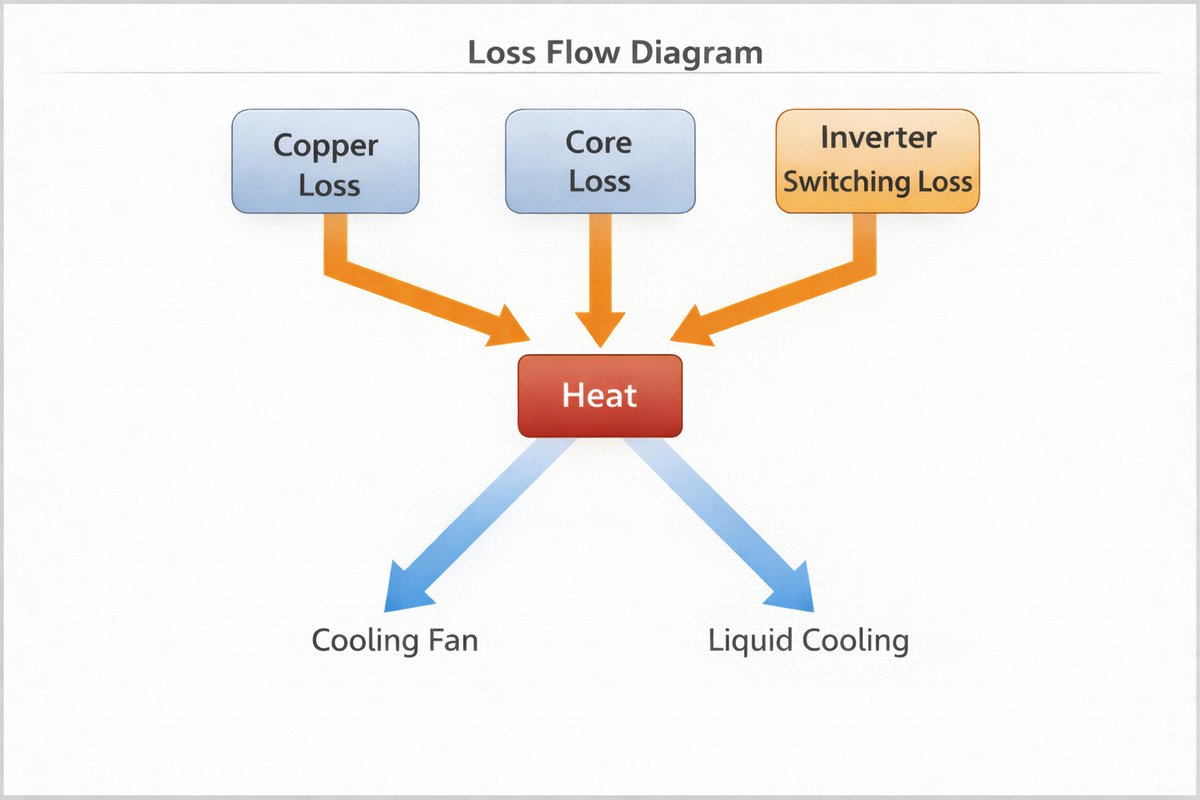
In einem bürstenlosen DC-Motorsystem wird nicht die gesamte Eingangsleistung in eine nützliche mechanische Ausgangsleistung umgewandelt. Ein Teil davon wird im Inneren des Motors und des Antriebs in Wärme umgewandelt. Der Großteil dieser Wärme stammt aus Kupferverlust, Kernverlust und Schaltverlust, und diese Verluste nehmen zu, wenn Strom und Geschwindigkeit steigen.
• Kupferverlust (I²R): Kupferverlust tritt in den Statorwicklungen auf und nimmt mit dem Strom zu. Ein höheres Drehmoment erfordert einen höheren Strom, sodass der Kupferverlust mit steigendem Drehmomentbedarf steigt.
• Kern- oder Eisenverlust: Der Kernverlust ist mit dem sich verändernden Magnetfeld im Stator verbunden. Sie steigt mit elektrischer Frequenz und Flussniveau, sodass sie bei höheren Geschwindigkeiten stärker benötigt wird.
• Schaltverlust: Schaltverlust tritt in der Leistungselektronik auf, die den Motor antreibt. Es hängt von der PWM-Frequenz, dem Typ der Schaltgeräte und dem Strom ab, der bei jedem Schaltereignis fließt.
Kühlung und thermischer Schutz in BLDC-Systemen
Eine thermische Regelung ist notwendig, um sowohl Motor als auch Wechselrichter innerhalb sicherer Betriebsgrenzen zu halten. Wärme sollte durch einen thermisch leitenden Montageweg und ausreichenden Luftstrom abgeführt werden, während die Stromgrenzen bei eingeschränkter Kühlung oder erwarteten langen Betriebszeiten konservativ eingestellt werden sollten. Temperaturmessung und thermischer Rücklauf können das System zusätzlich schützen, indem sie den Strom bei übermäßigen Temperaturen reduzieren und so die Zuverlässigkeit und Lebensdauer verbessern.
Anwendungen bürstenloser Gleichstrommotoren
Häufige Anwendungen bürstenloser Gleichstrommotoren
• Ventilatoren und Gebläse für Luftbewegung
• Pumpen zum Bewegen von Flüssigkeiten
• Elektrowerkzeuge und Kleinmaschinen
• Automatisierungs- und Bewegungssysteme
• Robotergelenke und Aktuatoren
• Batteriebetriebene Fahrzeuge und Geräte
Fazit
Bürstenlose Gleichstrommotoren funktionieren, indem sie Permanentmagnete mit elektronischer Steuerung kombinieren, um eine gleichmäßige, effiziente Bewegung zu erzeugen. Ihre tatsächliche Leistung hängt von korrektem Kommutationszeitpunkt, Rückkopplung der Rotorposition, Steuermethode, Wechselrichterbetrieb, Kühlung und korrekter Motor-Antriebsabstimmung ab. Geschwindigkeit, Drehmoment, Effizienz und Zuverlässigkeit werden alle von diesen Faktoren beeinflusst. Ihr Verständnis hilft zu erklären, wie BLDC-Systeme funktionieren, welche Grenzen sie haben und was die langfristige Leistung beeinflusst.
Häufig gestellte Fragen [FAQ]
Wie startet ein sensorloser BLDC-Motor aus dem Stillstand?
Es beginnt damit, den Rotor in eine bekannte Position zu drücken und den Motor dann im offenen Kreislauf laufen zu lassen. Sobald der Motor genug Geschwindigkeit für die Rück-EMF-Detektion erreicht hat, schaltet der Regler auf den normalen sensorlosen Betrieb um.
Was verursacht Lärm und Vibrationen in einem BLDC-Motor?
Lärm und Vibrationen entstehen durch Rotorungleichgewicht, Fehlausrichtung, abgenutzte Lager, Zahnraddrehmoment, ungleichmäßige Luftspalte und PWM-Umschaltung.
Wie wirkt sich die Lastträgheit auf einen BLDC-Motor aus?
Die hohe Lastträgheit macht den Motor langsamer beim Beschleunigung und Verzögern. Sie erhöht außerdem den Drehmomentbedarf und kann bei schnellen Drehzahlwechseln den Strom erhöhen.
Welche Stromversorgungs- und Verkabelungspunkte sind in einem BLDC-System wichtig?
Die Stromversorgung muss den Spitzenstrom ohne Spannungsabfall bewältigen. Kondensatoren müssen Schaltspitzen glatt machen, und die Verkabelung muss richtig dimensioniert, kurzgeschlossen und gut geerdet sein, um Rauschen zu reduzieren.
Welche Schutzfunktionen werden in BLDC-Laufwerken verwendet?
BLDC-Laufwerke verwenden Überstrom-, Überspannungs-, Unterspannungs-, Kurzschluss-, Stall- und Übertemperaturschutz, um Schäden zu verhindern.
Wie wirken sich Umweltbedingungen auf einen BLDC-Motor aus?
Staub, Feuchtigkeit, Hitze, Vibrationen und korrosive Bedingungen können die Leistung verringern, Teile beschädigen und die Lebensdauer des Motors verkürzen.









